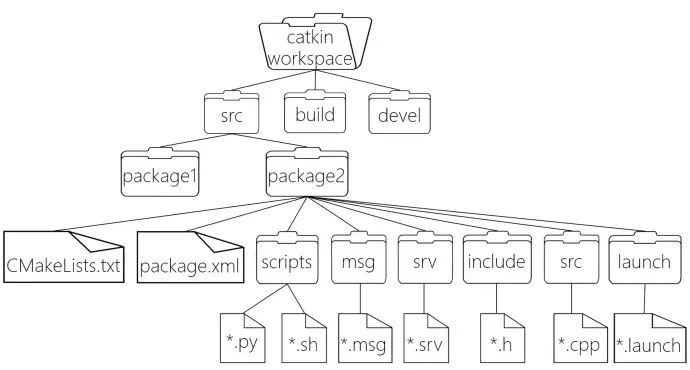
ROS文件系统级指的是在硬盘上ROS源代码的组织形式,其结构大致可以如下图所示:
详细结构树状图:
WorkSpace --- 自定义的工作空间
|--- build:编译空间,用于存放CMake和catkin的缓存信息、配置信息和其他中间文件。
|--- devel:开发空间,用于存放编译后生成的目标文件,包括头文件、动态&静态链接库、可执行文件等。
|--- src: 源码
|-- package:功能包(ROS基本单元)包含多个节点、库与配置文件,包名所有字母小写,只能由字母、数字与下划线组成
|-- CMakeLists.txt 配置编译规则,比如源文件、依赖项、目标文件
|-- package.xml 包信息,比如:包名、版本、作者、依赖项...(以前版本是 manifest.xml)
|-- scripts 存储python文件
|-- src 存储C++源文件
|-- include 头文件
|-- msg 消息通信格式文件
|-- srv 服务通信格式文件
|-- action 动作格式文件
|-- launch 可一次性运行多个节点
|-- config 配置信息
|-- CMakeLists.txt: 编译的基本配置
该文件定义有关软件包的属性,例如软件包名称,版本号,作者,维护者以及对其他catkin软件包的依赖性。
<!-- 包名 -->
<name>demo01_hello_vscode</name>
<!-- 版本 -->
<version>0.0.0</version>
<!-- 描述信息 -->
<description>The demo01_hello_vscode package</description>
<!-- 维护人员 -->
<maintainer email="[email protected]">xuzuo</maintainer>
<!-- 许可证信息,ROS核心组件默认 BSD -->
<license>BSD</license>
<!-- URL - 可选 -->
<!-- <url type="website"><http://wiki.ros.org/demo01_hello_vscode></url> -->
<!-- 其他维护者 - 可选 -->
<!-- <author email="[email protected]">Jane Doe</author> -->
<!-- 依赖的构建工具 -->
<buildtool_depend>catkin</buildtool_depend>
<!-- 指定构建此软件包所需的软件包 -->
<build_depend>roscpp</build_depend>
<build_depend>rospy</build_depend>
<build_depend>std_msgs</build_depend>
<!-- 指定根据这个包构建库所需要的包 -->
<build_export_depend>roscpp</build_export_depend>
<build_export_depend>rospy</build_export_depend>
<build_export_depend>std_msgs</build_export_depend>
<!-- 运行该程序包中的代码所需的程序包 -->
<exec_depend>roscpp</exec_depend>
<exec_depend>rospy</exec_depend>
<exec_depend>std_msgs</exec_depend>
文件CMakeLists.txt是CMake的系统输入,用于构建组件。CMakeLists.txt文件中包含一个多个CMakeLists.txt文件,这些文件代码以及将安装到哪里。
cmake_minimum_required(VERSION 3.0.2) #所需 cmake 版本
project(demo01_hello_vscode) #包名称,会被 ${PROJECT_NAME} 的方式调用
#设置构建所需要的软件包
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
)
# 生成消息、服务时的依赖包
# generate_messages(
# DEPENDENCIES
# std_msgs
# )
# 运行时依赖
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES demo01_hello_vscode
# CATKIN_DEPENDS roscpp rospy std_msgs
# DEPENDS system_lib
)
# 添加头文件路径,当前程序包的头文件路径位于其他文件路径之前
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
# 声明 C++ 库
# add_library(${PROJECT_NAME}
# src/${PROJECT_NAME}/demo01_hello_vscode.cpp
# )
# 添加库的 cmake 目标依赖
# add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
# 声明 C++ 可执行文件
add_executable(Hello_VSCode src/Hello_VSCode.cpp)
#重命名c++可执行文件
# set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
#添加可执行文件的 cmake 目标依赖
add_dependencies(Hello_VSCode ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
#指定库、可执行文件的链接库
target_link_libraries(Hello_VSCode
${catkin_LIBRARIES}
)
#设置用于安装的可执行脚本
catkin_install_python(PROGRAMS
scripts/Hi.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)