计算图(Computation Graph)是一个由ROS进程组成的点对点网络,它们能够共同处理数据。ROS的基本计算图概念有节点(Nodes)、主节点(Master)、参数服务器(Parameter Server)、消息(Messages)、服务(Services)、话题(Topics)和袋(Bags),它们都以不同的方式向图(Graph)提供数据。
rqt_graph能够创建一个显示当前系统运行情况的动态图形。ROS 分布式系统中不同进程需要进行数据交互,计算图可以以点对点的网络形式表现数据交互过程。rqt_graph是rqt程序包中的一部分。
用法:
$ rosrun rqt_graph rqt_graph
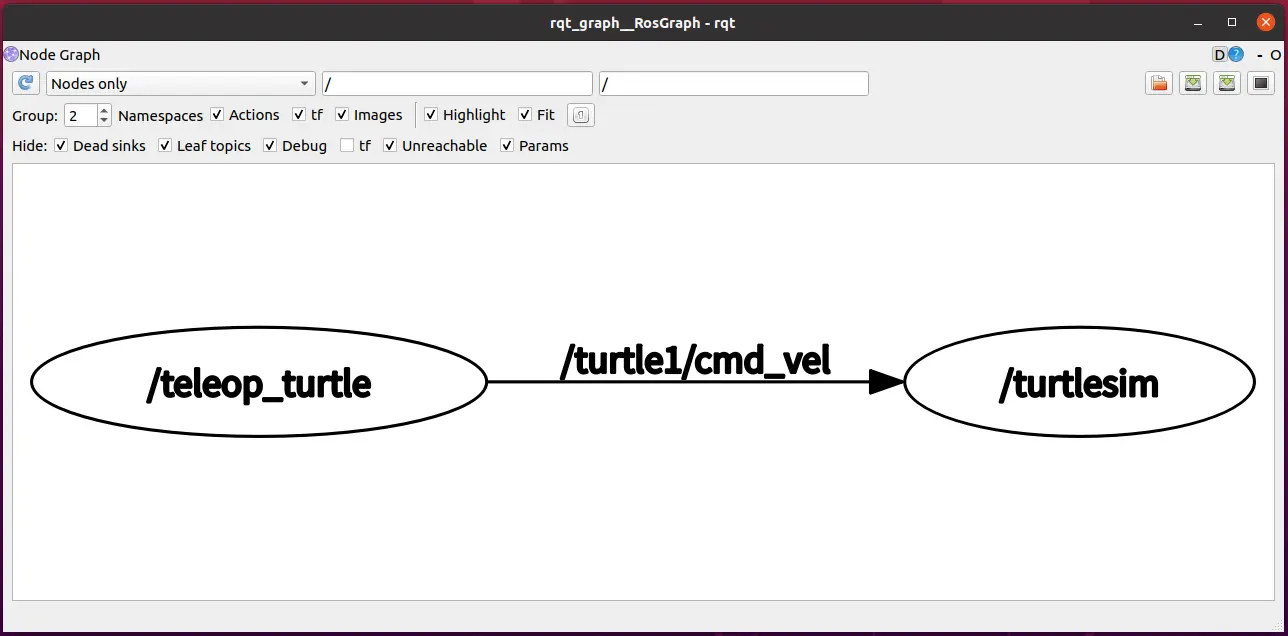
例如,运行内置小乌龟画图案例,然后显示计算图,将会得到:
可以使用rosnode看看roscore运行时干了些什么…… 记得要保持以前的终端开着,比如打开一个新的标签页,或者最小化之前的窗口。