服务通信是基于请求响应模式一种应答机制。即:一个节点A向另一个节点B发送请求,B接收处理请求并产生响应结果返回给A。服务通信更适用于对时时性有要求、具有一定逻辑处理的应用场景。
以请求响应的方式实现不同节点之间数据交互的通信模式。
用于偶然的、对时时性有要求、有一定逻辑处理需求的数据传输场景。
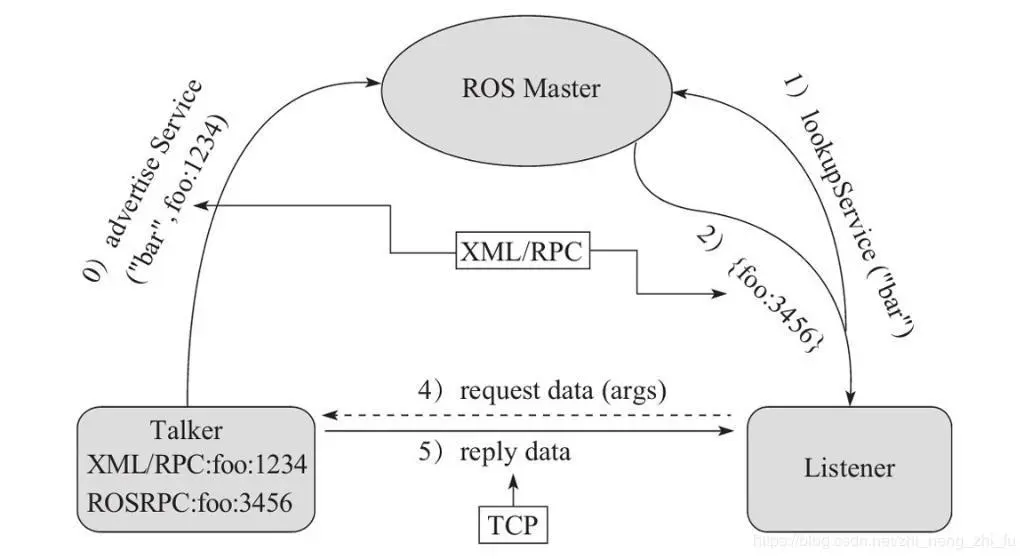
ROS Master 负责保管 Server 和 Client 注册的信息,并匹配话题相同的 Server 与 Client ,帮助 Server 与 Client 建立连接,连接建立后,Client 发送请求信息,Server 返回响应信息。
关注点: